

Khi đưa ra tư vấn về hệ thống vision, chúng tôi nghĩ rằng việc quay lại những điều cơ bản, để hiểu cách chọn camera phù hợp cho ứng dụng machine vision sẽ rất hữu ích. Với các tùy chọn ngày càng tăng, chúng tôi muốn phân tích chi tiết các lựa chọn có sẵn và hiểu tại sao chúng tôi sử dụng một số camera vision nhất định trong các giải pháp của mình.
Khả năng của camera
Khả năng chụp ảnh được chiếu sáng chính xác của đối tượng được kiểm tra của camera phụ thuộc vào mối quan hệ trực tiếp giữa cảm biến và ống kính. Công việc của cảm biến là chuyển đổi ánh sáng (photon) từ ống kính thành tín hiệu điện (electron). Thông thường, nó sẽ thực hiện việc này bằng cách sử dụng công nghệ Charge Coupled Device (CCD) hoặc Complementary Metal-Oxide-Semiconductor (CMOS) để số hóa các electron thành hình ảnh gồm các pixel. Sau đó, hình ảnh có thể được gửi đến bộ xử lý để phân tích. Ánh sáng yếu tạo ra các pixel tối và ánh sáng mạnh tạo ra các pixel sáng hơn.
Các thông số cần xem xét
Các thông số như kích thước part và dung sai kiểm tra sẽ giúp thông tin về độ phân giải cảm biến cần thiết và việc đảm bảo chọn đúng cảm biến cho ứng dụng yêu cầu là rất quan trọng. Độ chính xác cao hơn trong đo lường sẽ yêu cầu mức độ phân giải cảm biến cao hơn.
Các loại camera thường được sử dụng
Tùy thuộc vào yêu cầu của ứng dụng, hệ thống thị giác máy tính thường bao gồm một số camera. Chúng có thể là đơn sắc hoặc màu, và chụp, giải thích và báo hiệu với hệ thống điều khiển để cung cấp giải pháp cần thiết.
Line scan camera - Camera quét dòng (Cảm biến 1D):
Camera quét dòng thu thập các dòng hình ảnh đơn lẻ và thường được sử dụng để kiểm tra các vật thể chuyển động được vận chuyển qua camera. Chúng cũng có thể hữu ích cho các vật thể đang di chuyển, rất lớn hoặc các vật thể hình trụ có thể xoay. Trong trường hợp thông tin màu sắc quan trọng, điều này cũng có thể đạt được với camera quét dòng.
Tuy nhiên, vì camera chỉ chụp một dòng nên nó có thể đi kèm với một số hạn chế nhất định. Ví dụ, ánh sáng cần cực kỳ chính xác và do khẩu độ camera cần mở hầu hết thời gian, làm giảm độ sâu trường ảnh, có thể khiến việc chụp các vật thể ở các khoảng cách khác nhau trở nên khó khăn hơn.
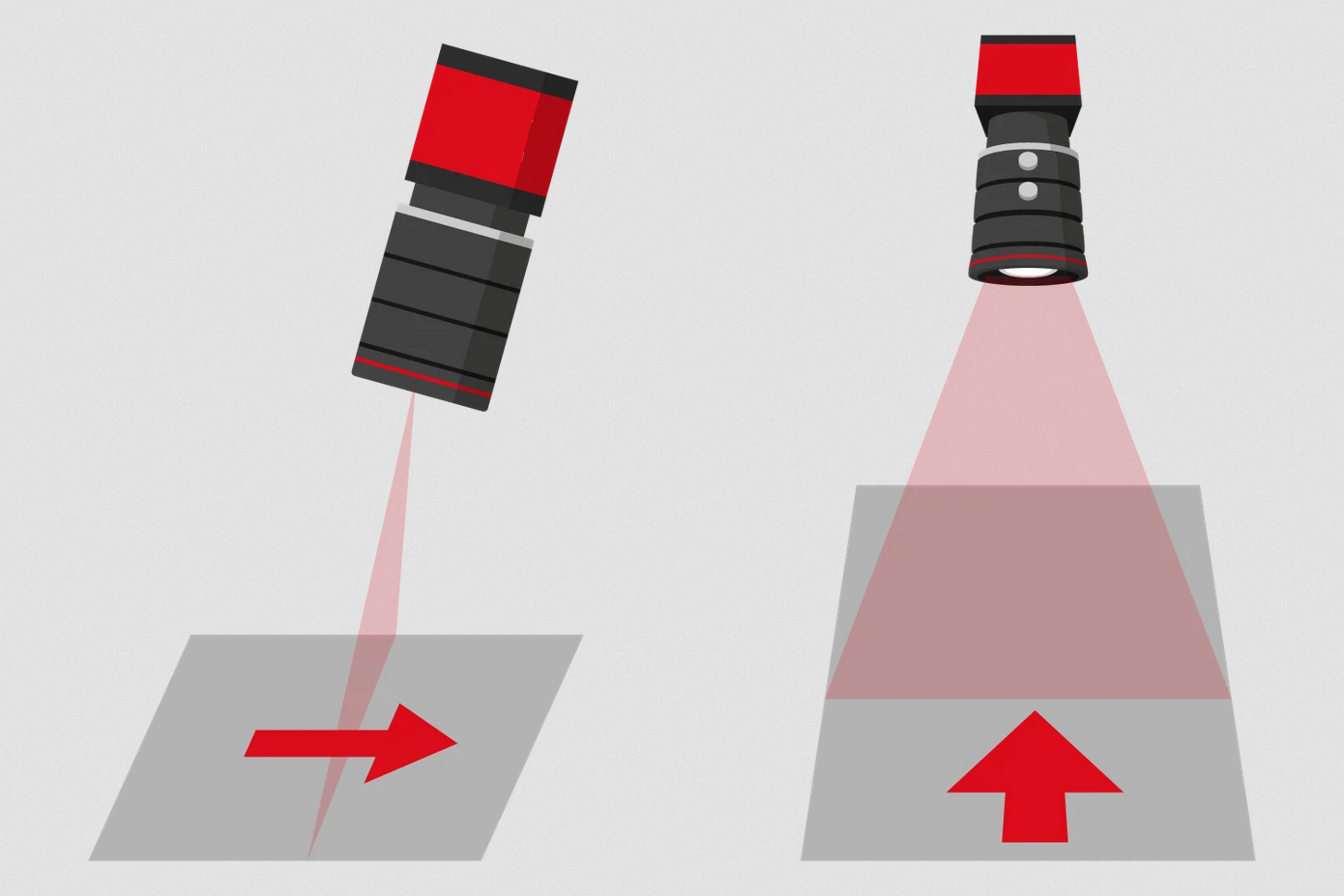
Area scan camera - Camera quét mặt phẳng (Cảm biến 2D):
Trong camera quét mặt phẳng, cảm biến có một ma trận pixel hình ảnh lớn tạo ra hình ảnh hai chiều trong một chu kỳ phơi sáng. Do camera quét mặt phẳng đang chụp một khu vực hình chữ nhật nên việc lắp đặt đèn chiếu sáng hiệu suất cao thường dễ dàng hơn so với camera quét dòng.
Camera quét mặt phẳng cũng cho phép chụp ảnh phơi sáng ngắn bằng đèn nháy cung cấp nhiều ánh sáng cho cảm biến trong thời gian ngắn. Do đó, camera quét mặt phẳng được sử dụng trong phần lớn các ứng dụng để lấy ảnh.
2D & 3D
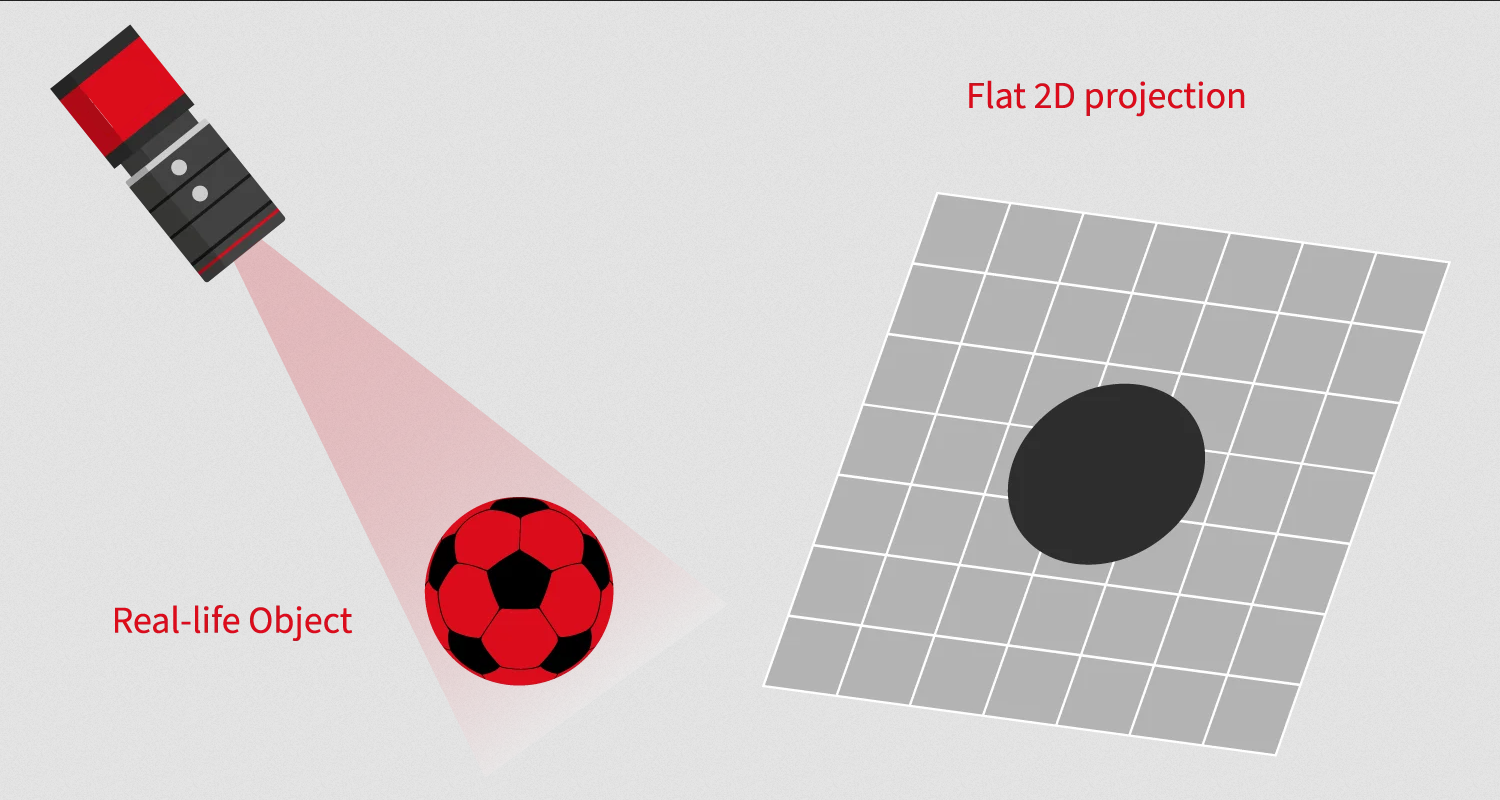
Machine vision 3D giúp vượt qua các thách thức phức tạp, độ chính xác cao, thời gian thực, trong đó những hạn chế thực tế của thị giác 2D nghĩa là nó đơn giản là không thể sử dụng được. Cụ thể, Thị giác 2D bị hạn chế trong các ứng dụng:
- Thông tin hình dạng rất quan trọng để thực hiện một nhiệm vụ
- Độ nhạy với các vấn đề về ánh sáng
- Khó đạt được độ tương phản cao
- Sự chuyển động của đối tượng có thể làm giảm độ chính xác của hình ảnh
- Cần thiết phải hình ảnh ba chiều, hình dạng hoặc thể tích
Tất nhiên, đối với nhiều ứng dụng đơn giản, những vấn đề này không đáng kể và do đó, thị giác 2D, sử dụng camera quét dòng hoặc camera quét mặt phẳng, là hoàn toàn chấp nhận được.
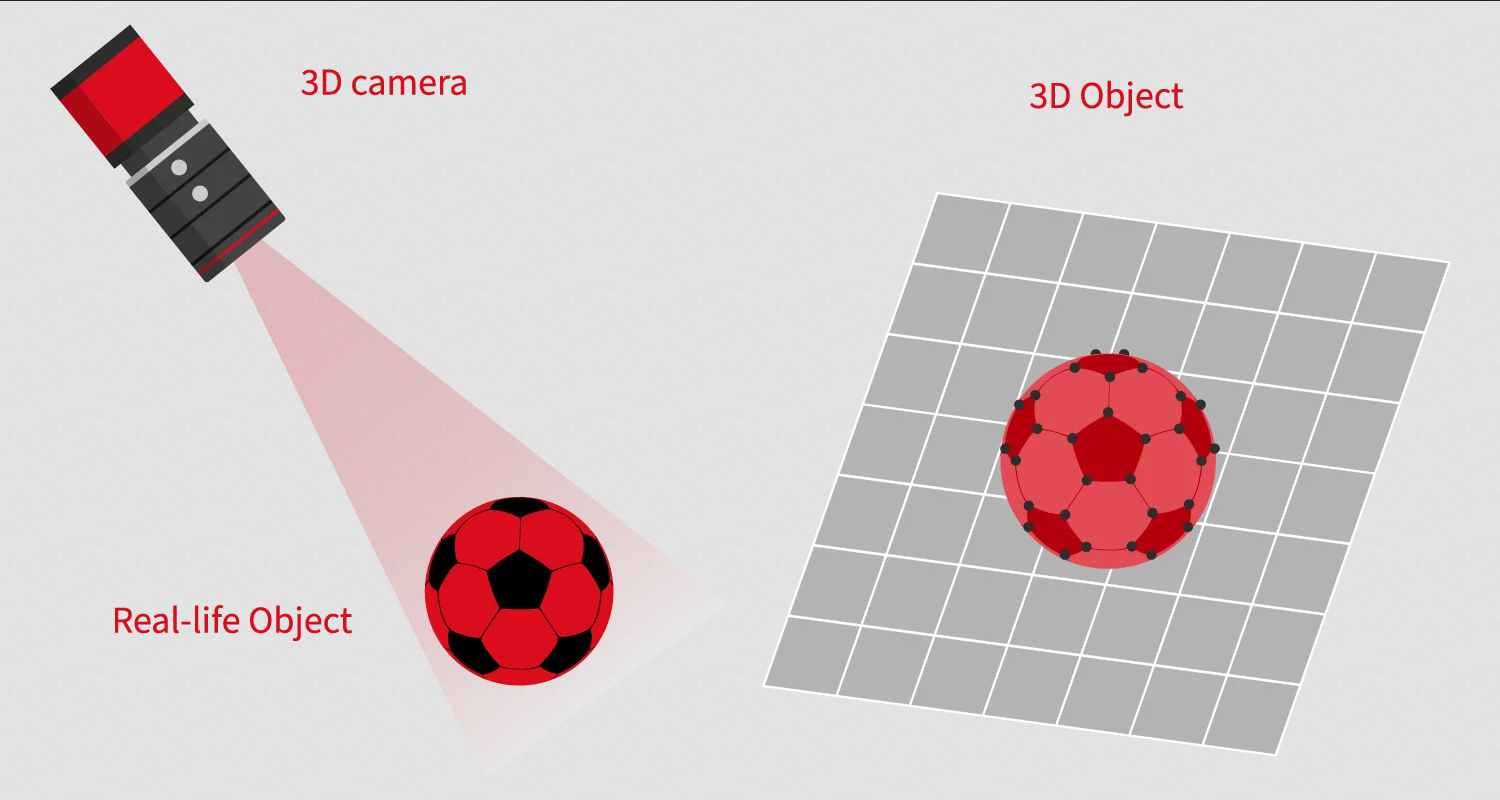
Tuy nhiên, hình ảnh 3D ngày càng đóng vai trò quan trọng trong ngành công nghiệp thị giác máy tính. Như đã nêu trong các bài đăng trước đây, mặc dù nó đòi hỏi nhiều thời gian, bộ xử lý và phần mềm hơn, nhưng những tiến bộ nhanh chóng về công nghệ, thuật toán và phần mềm có nghĩa là các hệ thống này hiện nay có khả năng đáp ứng các yêu cầu thông lượng của dây chuyền sản xuất. Do chúng chụp dữ liệu ba chiều bổ sung một cách đáng tin cậy, các hệ thống thị giác máy tính 3D không bị ảnh hưởng bởi các khía cạnh về ánh sáng, độ tương phản và khoảng cách đến vật thể mà các hệ thống 2D gặp phải.
Do đó, một số ứng dụng chính của hình ảnh 3D bao gồm:
- Đo khối lượng, chiều cao, độ dày, lỗ, đường cong và góc
- Điều khiển robot, lấy hàng từ thùng để đặt, đóng gói hoặc lắp ráp
- Kiểm soát chất lượng nơi các mô hình CAD 3D đã được sử dụng
- Trường hợp cần hiểu về không gian và kích thước 3D
- Kiểm tra các vật thể có độ tương phản thấp
Có bốn phương pháp phổ biến thường được sử dụng cho hình ảnh 3D:
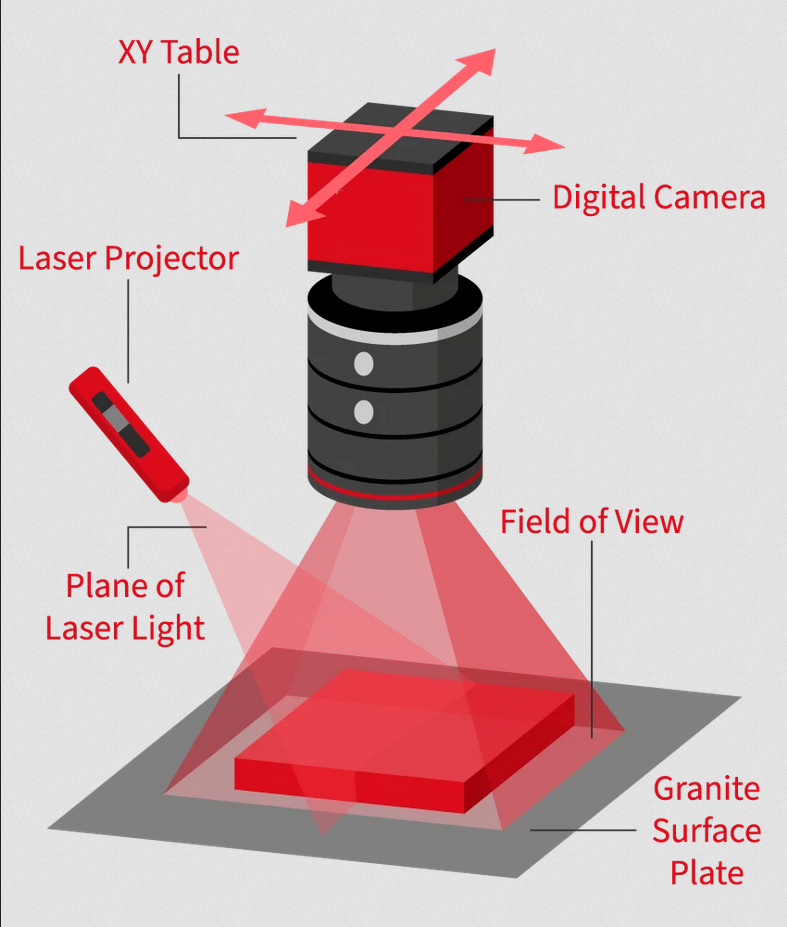
- Tam giác dựa trên quét: Mô tả mối quan hệ góc giữa đối tượng được quét, tia laser và camera. Phương pháp tiếp cận liên quan đến việc chiếu laser lên bề mặt của một vật thể sau đó được camera nhìn từ một góc đo khác. Bất kỳ độ lệch nào của đường biểu thị các biến thể hình dạng và các đường từ nhiều lần quét có thể được lắp ráp thành bản đồ độ sâu hoặc đám mây điểm, đại diện cho hình ảnh 3D. Thông thường, nhiều camera được sử dụng, theo dõi các đường laser từ các góc khác nhau và sau đó hợp nhất các tập dữ liệu thành một cấu hình duy nhất. Điều này giúp khắc phục mọi vấn đề về "bóng đổ", tình huống mà một đường laser đơn lẻ bị chặn không cho đi qua các phần của một vật thể bởi các phần khác của cùng một vật thể.
- Thị giác lập thể: Như tên gọi cho thấy, dựa trên việc sử dụng hai camera, giống như một cặp mắt người. Sử dụng kỹ thuật tam giác, hai hình ảnh 2D được chụp sau đó được sử dụng để tính toán hình ảnh 3D.
- Camera 3D thời gian bay: Đo thời gian mà một xung ánh sáng cần để đến vật thể và quay trở lại cho mỗi điểm ảnh. Do đó, chúng có những hạn chế về khoảng cách có thể sử dụng từ vật thể và độ phân giải, nghĩa là chúng chỉ phù hợp cho các ứng dụng cụ thể.
- Ánh sáng có cấu trúc: Sử dụng các kỹ thuật ánh sáng tinh vi để tạo ra các mẫu có cấu trúc mã hóa thông tin 3D trực tiếp đến cảnh camera.
Bất kể nhiệm vụ là gì, điều quan trọng là phải hiểu cách tất cả các yếu tố của hệ thống thị giác máy tính tương tác để tạo ra một giải pháp mạnh mẽ và đáng tin cậy. Bắt đầu với camera là cách tiếp cận tốt nhất và xây dựng kiến trúc hệ thống xung quanh nó.





















